在广袤的稻田中,农作物的生长状态直接关系到粮食的产量和质量。然而,自然环境的不确定性,如大风等恶劣天气,常常给农作物带来倒伏的风险。倒伏不仅会导致产量下降,还会给后续的机械化收割带来极大的困难,甚至造成严重的浪费。传统的农田作业模式在面对这些问题时显得力不从心,而随着 AI 智能化技术的快速发展,传统农业正迎来一场深刻的变革。
一、传统农田作业的困境
在传统的稻田种植中,农民们依靠丰富的经验和敏锐的观察力来管理农田。然而,面对大面积的农田,人工巡查的方式效率低下,且难以及时发现所有倒伏区域。一旦错过最佳处理时间,倒伏的作物可能会被收割机碾入泥土,造成不可挽回的损失。此外,在作物生长过程中,缺乏有效的监测手段,无法及时发现倒伏情况,导致损失的发生。
二、AI 智能化技术的崛起
近年来,AI 智能化技术在多个传统行业得到了广泛应用,农业也不例外。借助无人机技术,可以快速实现大规模农田的巡航,采集丰富的图像数据。这些数据为开发智能化的倒伏检测识别模型提供了基础。无人机在农田上空飞行,就像一双“天眼”,能够快速完成大片农田的巡检,及时发现异常倒伏片区的位置。
三、无人机与 AI 模型的协同作战
无人机配备高分辨率相机和传感器,能够在短时间内获取大量农田图像数据。这些图像数据被传输到云端或本地服务器,由 AI 模型进行分析。AI 模型通过深度学习算法,能够准确识别出倒伏的区域,并评估倒伏的严重程度。一旦发现倒伏情况,系统会立即发送预警信息到调度端,通知农业人员进行处理。
无人机的优势
- 高效巡检:无人机可以在短时间内覆盖大面积农田,大大提高了巡检效率。
- 精准定位:通过 GPS 定位技术,无人机能够精准定位倒伏区域,为后续处理提供准确信息。
- 实时反馈:无人机采集的数据可以实时传输到后台,农业人员可以第一时间获取农田的最新情况。
AI 模型的作用
- 智能识别:AI 模型能够自动识别倒伏区域,减少人工误判。
- 风险评估:模型可以根据倒伏的严重程度,评估潜在的损失风险,为决策提供依据。
- 预警通知:一旦发现倒伏情况,系统会立即发送预警信息,确保及时处理。
四、实际应用案例
在安徽龙亢农场,1.2 万亩的单季粳稻种植区成功应用了无人机与 AI 模型的协同作业。2023 年 9 月,台风“梅花”过境,农场提前启动无人机应急巡检,共获取 2.3 万张高清影像。AI 模型在这些影像中检出倒伏区域 187 块,合计 914 亩,占总面积的 7.6%。通过及时调度收割机和割晒机,48 小时内完成了全部抢救性收割。经实收测产,平均损失率仅为 2.1%,相比未使用 AI 巡检的田块降低了 11.4 个百分点,折合增收稻谷 137 吨,直接经济效益达 41 万元。
本文正是在这样的思考背景下,想要探索尝试从实验性质的角度开发构建无人机快速巡航场景下的农田作物倒伏异常检测识别系统,在前面的系列博文中我们已经进行了相关的开发实践感兴趣的话可以自行移步阅读即可:
《AI无人机助力生态智慧农田倒伏检测与防控,基于端到端YOLOv10全系列【n/s/m/b/l/x】参数模型开发构建无人机航拍智慧生态农田场景下稻田作物倒伏智能化检测预警系统》
《AI无人机助力生态智慧农田倒伏检测与防控,基于YOLOv11全系列【n/s/m/l/x】参数模型开发构建无人机航拍智慧生态农田场景下稻田作物倒伏智能化检测预警系统》
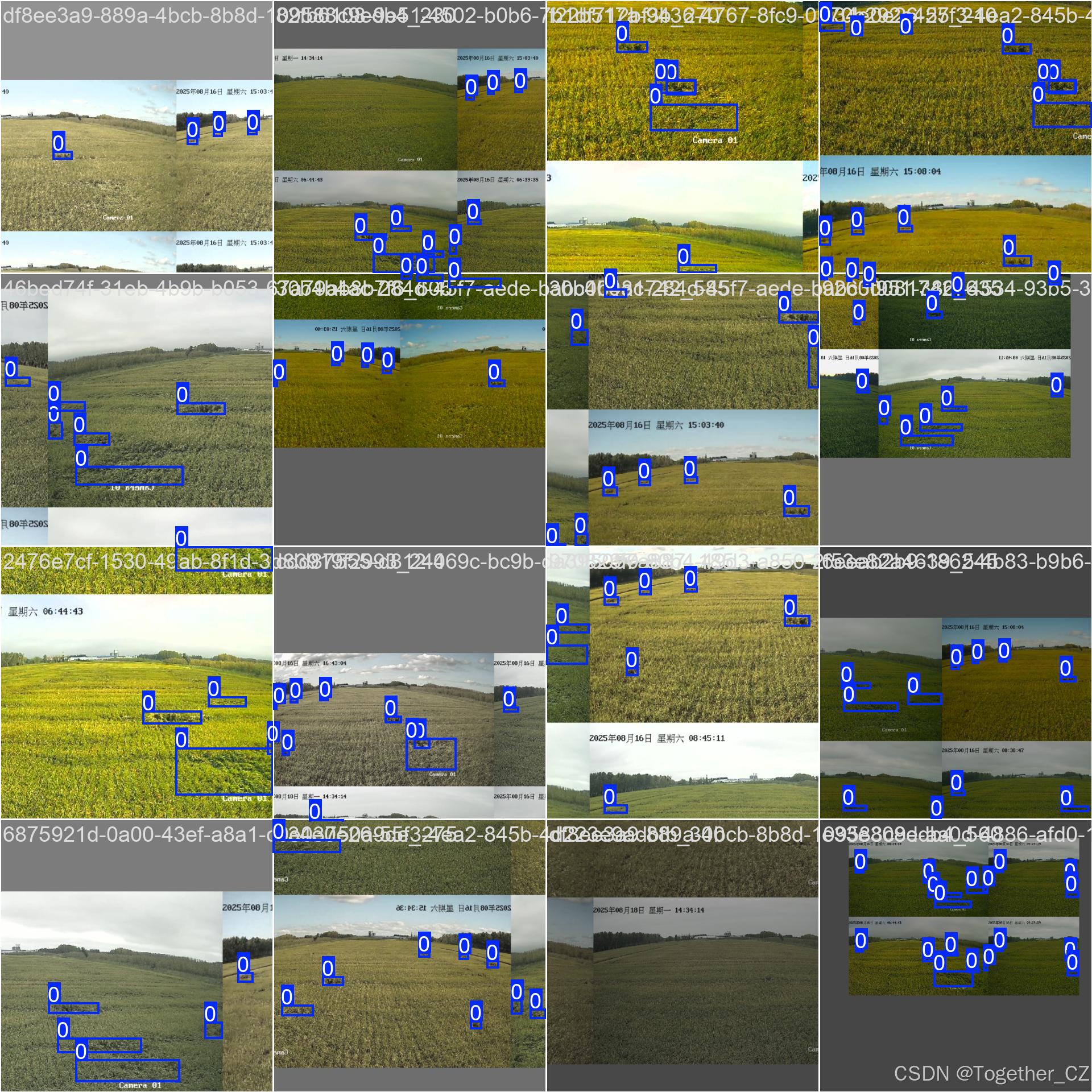
本文主要是想要基于YOLOv12全系列的模型来进行相应的开发实践,首先看下实例效果:
接下来看下实例数据情况:
YOLO系列最近的迭代速度不可谓不快,可能感觉YOLOv11都还没有推出多久,YOLOv12就这么水灵灵地来了,下面是对YOLOv12论文的阅读记录,感兴趣的话可以自行移步阅读即可:
官方发布的预训练权重如下:
Main Results
Turbo (default):
| Model (det) | size (pixels) | mAPval 50-95 | Speed (ms) T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|
| YOLO12n | 640 | 40.4 | 1.60 | 2.5 | 6.0 |
| YOLO12s | 640 | 47.6 | 2.42 | 9.1 | 19.4 |
| YOLO12m | 640 | 52.5 | 4.27 | 19.6 | 59.8 |
| YOLO12l | 640 | 53.8 | 5.83 | 26.5 | 82.4 |
| YOLO12x | 640 | 55.4 | 10.38 | 59.3 | 184.6 |
v1.0:
| Model (det) | size (pixels) | mAPval 50-95 | Speed (ms) T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|
| YOLO12n | 640 | 40.6 | 1.64 | 2.6 | 6.5 |
| YOLO12s | 640 | 48.0 | 2.61 | 9.3 | 21.4 |
| YOLO12m | 640 | 52.5 | 4.86 | 20.2 | 67.5 |
| YOLO12l | 640 | 53.7 | 6.77 | 26.4 | 88.9 |
| YOLO12x | 640 | 55.2 | 11.79 | 59.1 | 199.0 |
| Model (seg) | size (pixels) | mAPbox 50-95 | mAPmask 50-95 | Speed (ms) T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|---|
| YOLOv12n-seg | 640 | 39.9 | 32.8 | 1.84 | 2.8 | 9.9 |
| YOLOv12s-seg | 640 | 47.5 | 38.6 | 2.84 | 9.8 | 33.4 |
| YOLOv12m-seg | 640 | 52.4 | 42.3 | 6.27 | 21.9 | 115.1 |
| YOLOv12l-seg | 640 | 54.0 | 43.2 | 7.61 | 28.8 | 137.7 |
| YOLOv12x-seg | 640 | 55.2 | 44.2 | 15.43 | 64.5 | 308.7 |
| Model (cls) | size (pixels) | Acc. top-1 | Acc. top-5 | Speed (ms) T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|---|
| YOLOv12n-cls | 224 | 71.7 | 90.5 | 1.27 | 2.9 | 0.5 |
| YOLOv12s-cls | 224 | 76.4 | 93.3 | 1.52 | 7.2 | 1.5 |
| YOLOv12m-cls | 224 | 78.8 | 94.4 | 2.03 | 12.7 | 4.5 |
| YOLOv12l-cls | 224 | 79.5 | 94.5 | 2.73 | 16.8 | 6.2 |
| YOLOv12x-cls | 224 | 80.1 | 95.3 | 3.64 | 35.5 | 13.7 |
一共提供了n、s、m、l和x五款不同参数量级的模型。
这里我们保持完全相同的实验参数设置来进行四款模型的开发训练,等待训练完成之后我们来整体进行各项指标的对比分析。
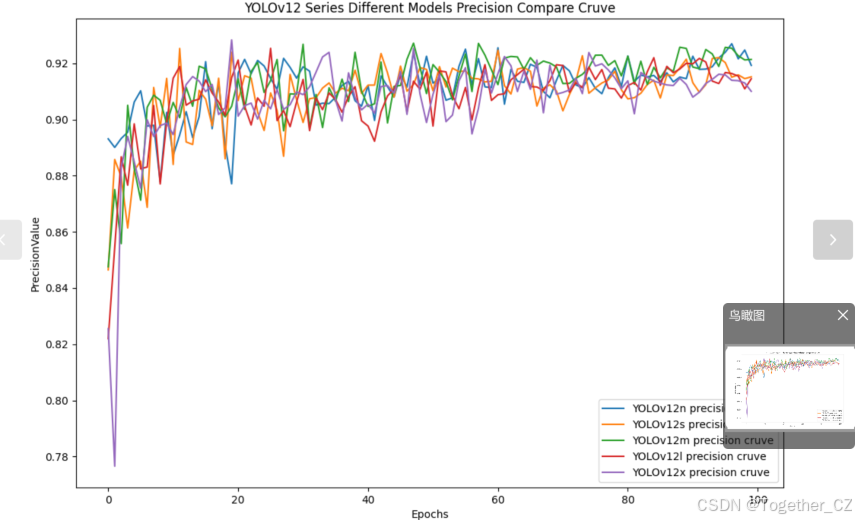
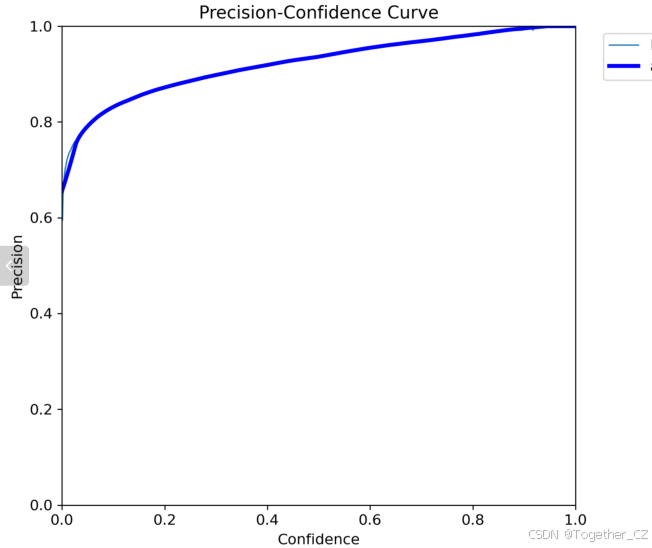
【Precision曲线】
精确率曲线(Precision Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
绘制精确率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率和召回率。
将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率曲线。
根据精确率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察精确率曲线,我们可以根据需求确定最佳的阈值,以平衡精确率和召回率。较高的精确率意味着较少的误报,而较高的召回率则表示较少的漏报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
精确率曲线通常与召回率曲线(Recall Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
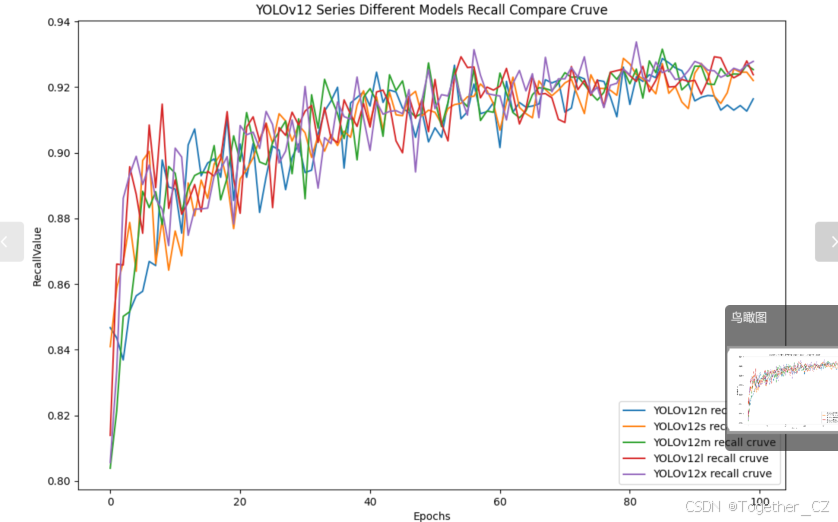
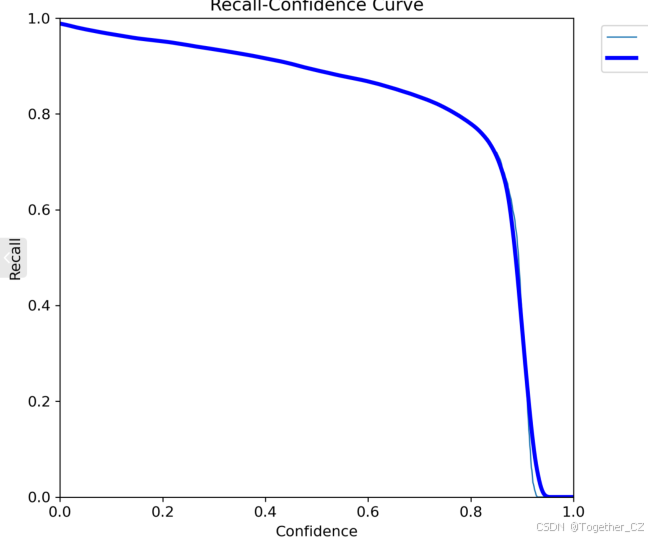
【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。
召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
绘制召回率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的召回率和对应的精确率。
将每个阈值下的召回率和精确率绘制在同一个图表上,形成召回率曲线。
根据召回率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察召回率曲线,我们可以根据需求确定最佳的阈值,以平衡召回率和精确率。较高的召回率表示较少的漏报,而较高的精确率意味着较少的误报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
召回率曲线通常与精确率曲线(Precision Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
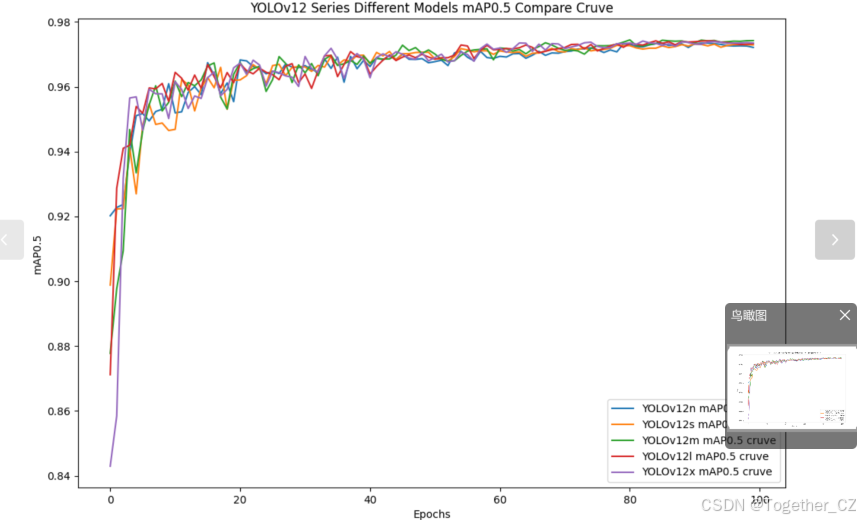
【mAP0.5】
mAP0.5,也被称为[email protected]或AP50,指的是当Intersection over Union(IoU)阈值为0.5时的平均精度(mean Average Precision)。IoU是一个用于衡量预测边界框与真实边界框之间重叠程度的指标,其值范围在0到1之间。当IoU值为0.5时,意味着预测框与真实框至少有50%的重叠部分。
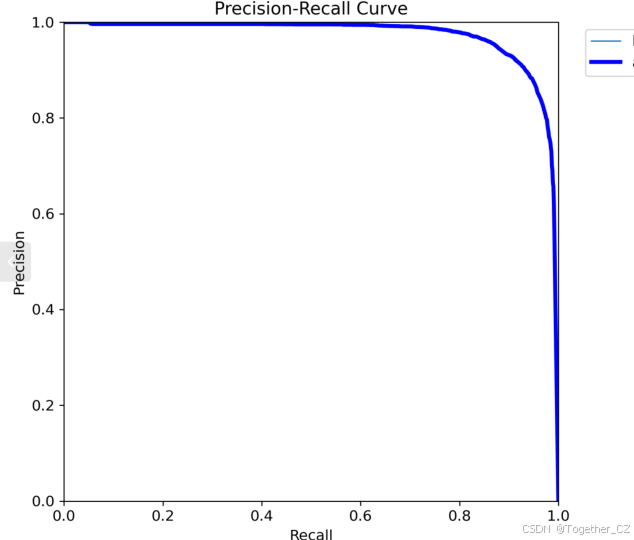
在计算mAP0.5时,首先会为每个类别计算所有图片的AP(Average Precision),然后将所有类别的AP值求平均,得到mAP0.5。AP是Precision-Recall Curve曲线下面的面积,这个面积越大,说明AP的值越大,类别的检测精度就越高。
mAP0.5主要关注模型在IoU阈值为0.5时的性能,当mAP0.5的值很高时,说明算法能够准确检测到物体的位置,并且将其与真实标注框的IoU值超过了阈值0.5。
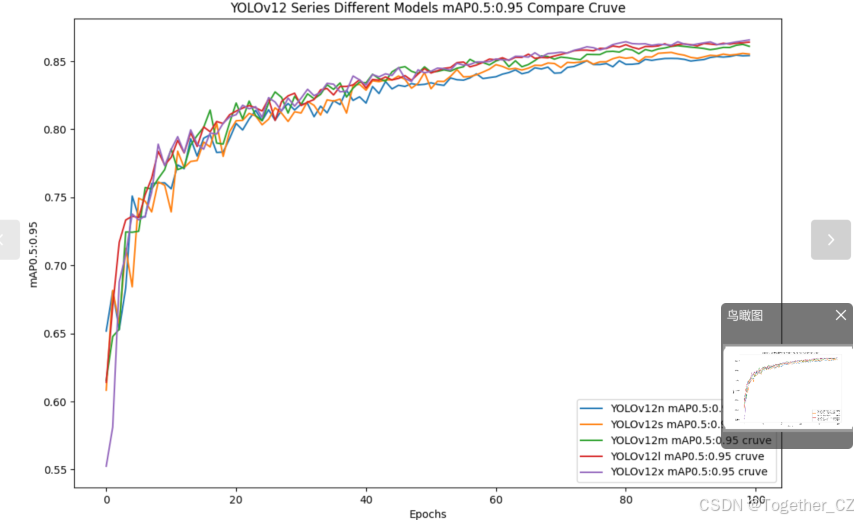
【mAP0.5:0.95】
mAP0.5:0.95,也被称为mAP@[0.5:0.95]或AP@[0.5:0.95],表示在IoU阈值从0.5到0.95变化时,取各个阈值对应的mAP的平均值。具体来说,它会在IoU阈值从0.5开始,以0.05为步长,逐步增加到0.95,并在每个阈值下计算mAP,然后将这些mAP值求平均。
这个指标考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。当mAP0.5:0.95的值很高时,说明算法在不同阈值下的检测结果均非常准确,覆盖面广,可以适应不同的场景和应用需求。
对于一些需求比较高的场合,比如安全监控等领域,需要保证高的准确率和召回率,这时mAP0.5:0.95可能更适合作为模型的评价标准。
综上所述,mAP0.5和mAP0.5:0.95都是用于评估目标检测模型性能的重要指标,但它们的关注点有所不同。mAP0.5主要关注模型在IoU阈值为0.5时的性能,而mAP0.5:0.95则考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。
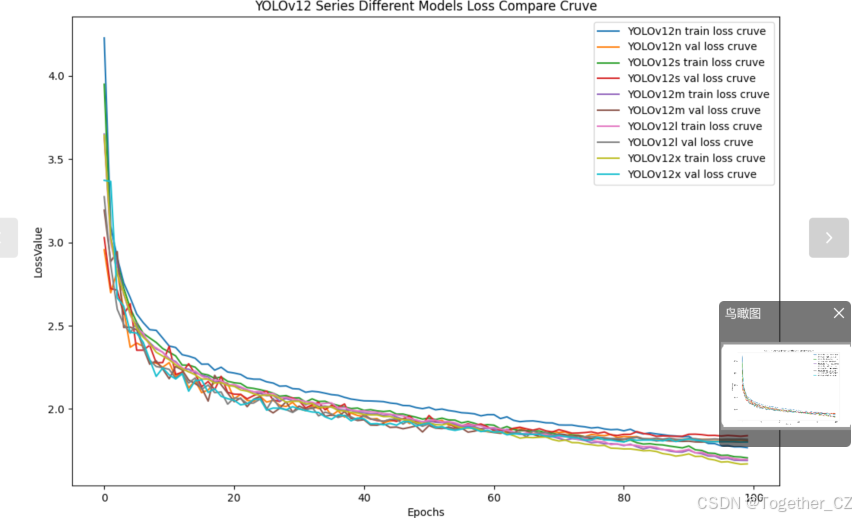
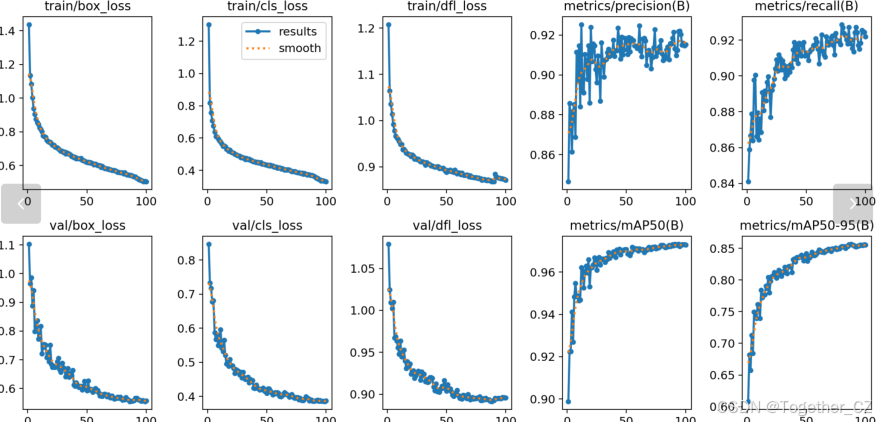
【loss曲线】
在深度学习的训练过程中,loss函数用于衡量模型预测结果与实际标签之间的差异。loss曲线则是通过记录每个epoch(或者迭代步数)的loss值,并将其以图形化的方式展现出来,以便我们更好地理解和分析模型的训练过程。
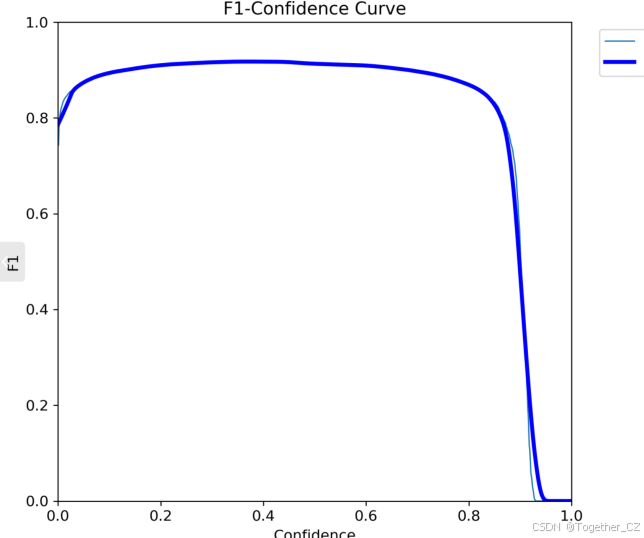
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。
F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
绘制F1值曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率、召回率和F1分数。
将每个阈值下的精确率、召回率和F1分数绘制在同一个图表上,形成F1值曲线。
根据F1值曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
F1值曲线通常与接收者操作特征曲线(ROC曲线)一起使用,以帮助评估和比较不同模型的性能。它们提供了更全面的分类器性能分析,可以根据具体应用场景来选择合适的模型和阈值设置。
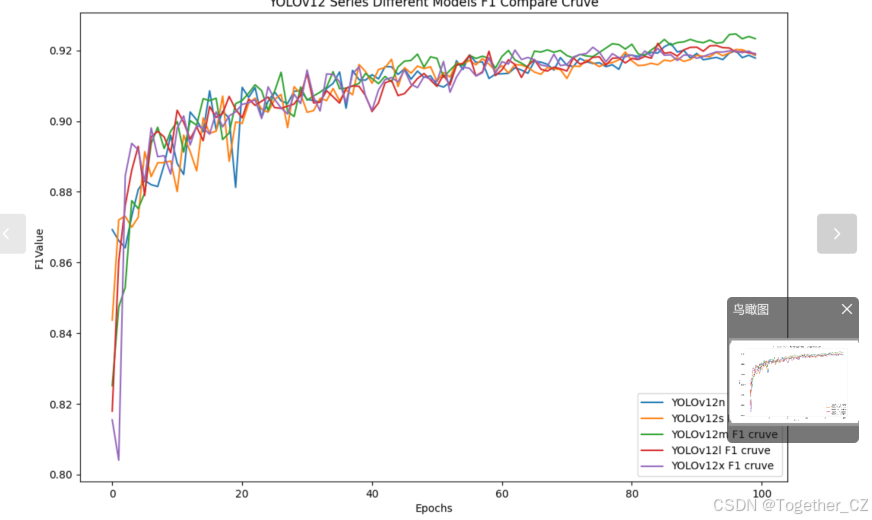
整体对比分析来看:不难发现五款不同参数量级的模型最终达到了较为相似的结果,没有拉开非常大的差距,这里综合参数量考虑我们最终选定了s系列的模型来作为线上的推理计算模型。
接下来看下s系列模型的详细情况。
【离线推理实例】

【Batch实例】
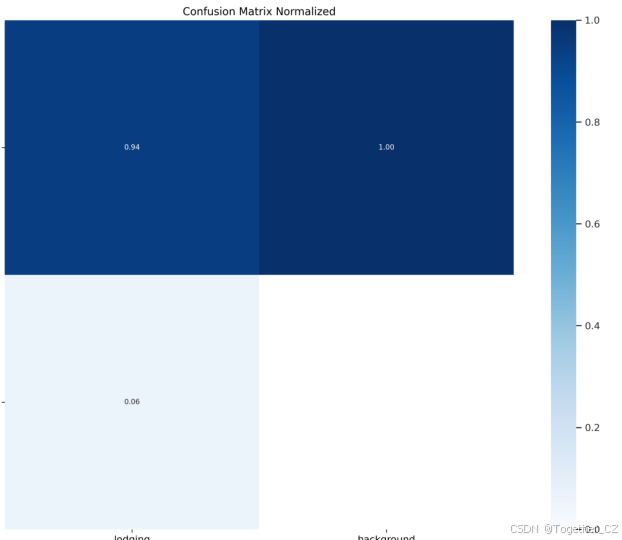
【混淆矩阵】
【F1值曲线】
【Precision曲线】
【PR曲线】
【Recall曲线】
【训练可视化】
随着技术的不断进步,无人机与 AI 模型的结合将更加紧密。未来,我们可以期待以下发展方向:
- 多源数据融合:结合气象雷达、风场模型与卫星云图,提前预测倒伏高风险区,实现“风未至、机先行”。
- 数字孪生农田:在虚拟空间实时映射作物长势、土壤含水、茎秆强度,模拟不同风速下的倒伏概率,为种植决策提供科学依据。
- 农机无人化:倒伏稻田地面湿滑,传统轮式机易下陷。未来的无人收割机将具备更强的适应性,实现“云端一键启动—机群协同作业—倒伏穗头自动扶起—低损收获”全链条无人化。
六、结语
粮食安全是“国之大者”。当 AI 的“最强大脑”装上无人机的“千里之眼”,传统农业的面貌正在被重新定义。从“看天吃饭”到“知天而作”,科技赋予农业的不仅是产量的提升,更是把“望田兴叹”的无奈,变成“掌上看田、指尖调度”的从容。未来,广袤田野之上,将继续上演更多“智慧种田”的中国故事,让每一寸稻田都能挺直腰杆,迎来属于自己的金色丰收。
《AI无人机助力生态智慧农田倒伏检测与防控,基于最新以注意力为核心的YOLOv12全系列【n/s/m/l/x】参数模型开发构建无人机航拍智慧生态农田场景下稻田作物倒伏智能化检测预警系统》 是转载文章,点击查看原文。

